Основные научные результаты
Отдел "Механика машин и управление машинами" — старейшее научное подразделение Института. У истоков этого направления стояли ведущие учёные академики И.И. Артоболевский и А.А. Благонравов. П о инициативе академика И .И . Артоболевского в И М А Ш в 50-е годы прошлого века был создан отдел теории машин и механизмов, направление работы которого является одним из основных в Институте. Отдел решал и решает комплексные задачи в области создания и исследования машин различного назначения. Именно в И М А Ш был впервые в мире создан образец протеза руки, работающего под воздействием электрических импульсов, генерируемых мускулами человека.
Разработаны методы анализа и синтеза новых классов механизмов и технологических процессов для машин нового поколения.
В результате сотрудничества Института с Астрокосмическим центром ФИАН им. П.Н.Лебедева разработан и создан телескоп нового поколения, в котором используются робототехнические системы для перемещения антенны.
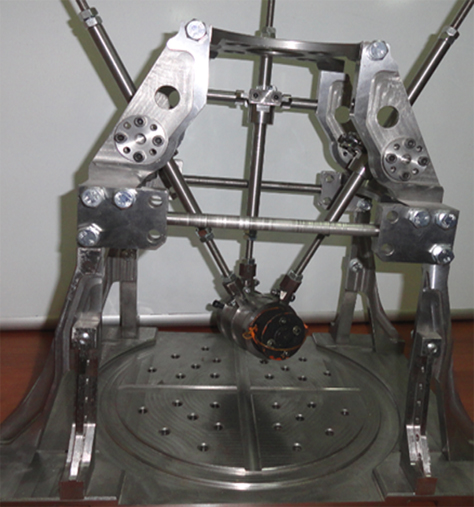
Актуальной задачей синтеза машин является создание устройств, предназначенных для исследовательских целей. Разработано устройство, которое планируется использовать в Ц Н И И М А Ш при разработке гиперзвуковых систем, также оно может быть применено в ЦАГИ для работы в аэродинамических трубах. Подобные схемы могут быть использованы в других технических приложениях, в частности при манипулировании в агрессивных средах (космос, океан).
.jpg)
Манипулятор для испытаний моделей летательных аппаратов
в аэродинамической трубе
Робот-станок РОСТ-300 для финишной обработки пера лопаток реактивных двигателей.jpg)
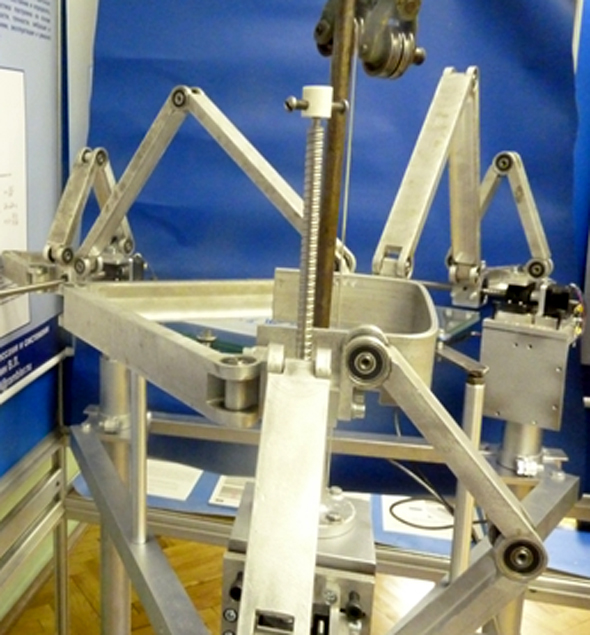
Манипулятор с карданными шарнирами и дополнительными тягами

Отдел активно занимается созданием машин нового поколения, одновременно решая задачу импортозамещения
Фасовочно-упаковочная линия
для дозировки жидких продуктов питания.

Технологический робот
 Механизм со стабилизирующими
Механизм со стабилизирующими
звеньями
Одной из важных задач в современной технике (транспорт, авиация, космос) является разработка тренажёров для подготовки экипажей наземных транспортных средств и летательных аппаратов. Для решения этой задачи в отделе был синтезирован ряд схем механизмов параллельной структуры с применением круговой направляющей, обладающих качественно новым функционалом - имитация условий «юза» и поворота транспортных средств, а также «штопора» летательных аппартов.
Совместно с УдГУ (Ижевск), механико-математическим факультетом МГУ, ИПМ им. М.В. Келдыша, ЗАО «Ровер» (Санкт-Петербург) разработан первый в России сферобот - робот-шар SpheROB. Подобные аппараты в силу своей герметичной конструкции могут использоваться для исследования зон с агрессивной средой, например, мест аварий или поверхности других планет.
Макет тренажёра для подготовки водителей
Сферобот – мобильный робот-шар

Синтезированы системы микроманипулирования для высокопрецизионных хирургических манипуляций в урологии, ортопедии, кардиологии. Разрабатываемые механизмы, в которых приводы установлены на основании, являются отечественной альтернативой
известному роботу da Vinci.
Хирургические роботы



Отдел активно и плодотворно сотрудничает с Центральной клинической больницей РАН, с клиникой им. С.П. Боткина, с МГТУ им. Н.Э. Баумана, с ЦКБ РАН, с ИКТИ РАН, с Московским университетом дизайна и технологии. Разрабатываемые системы представляют собой импортозамещающую технику, в ряде случаев опережающую зарубежный уровень.
Научные результаты 2000-е годы
